Comportement mécanique des matériaux - Relation entre la contrainte et la déformation |
||
Tenseur et équivalentsDans notre monde en trois dimensions, les contraintes et déformations en un point dans un matériau s'exprime par un tenseur à six degrés de libertés. Lorsque l'on a choisi un système de coordonnée ce tenseur s'exprime dans ce système sous la forme d'une matrice 3x3. Voir le chapitre Contraintes et déformations. Pour faciliter l'analyse etles comparaisons sur les états de contrainte/déformation on utilise des "équivalents". Un équivalent est une valeur (scalaire) calculée en utilisant les différents composants de la matrice des contraintes/déformations. Cet équivalent doit être le plus représentatif possible de l'état de contrainte/déformation en un point donné. Le choix du système de coordonnée ne doit évidemment pas influencer la valeur de l'équivalent. L'équivalent le plus utilisé est celui de von Mises:
Cet équivalent représente l'énergie de distorsion élastique. Notons encore l'équivalent de Tresca:
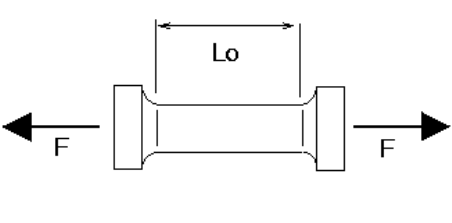
Cette valeur représente le cisaillement maximal. Sur une représentation graphique de la contrainte par rapport à la déformation on utilise nécessairement un équivalent. Pour une représentation de type cartographie telle que l'on obtient en simulations numérique on utilise également un équivalent. Contrainte/déformation technique - Engineering strain/stressDans le cas d'un test de traction uniaxial on défini un nouveau type de contraintes/déformations, dîtes "techniques" (engineering strain/stress). Il s'agit en fait de valeurs directement déduites des paramètres expérimentaux. Les coupons de test on généralement la forme suivante:
Si A0 est la section de la zone en déformation alors les contraintes/déformations techniques sont alors définis par:
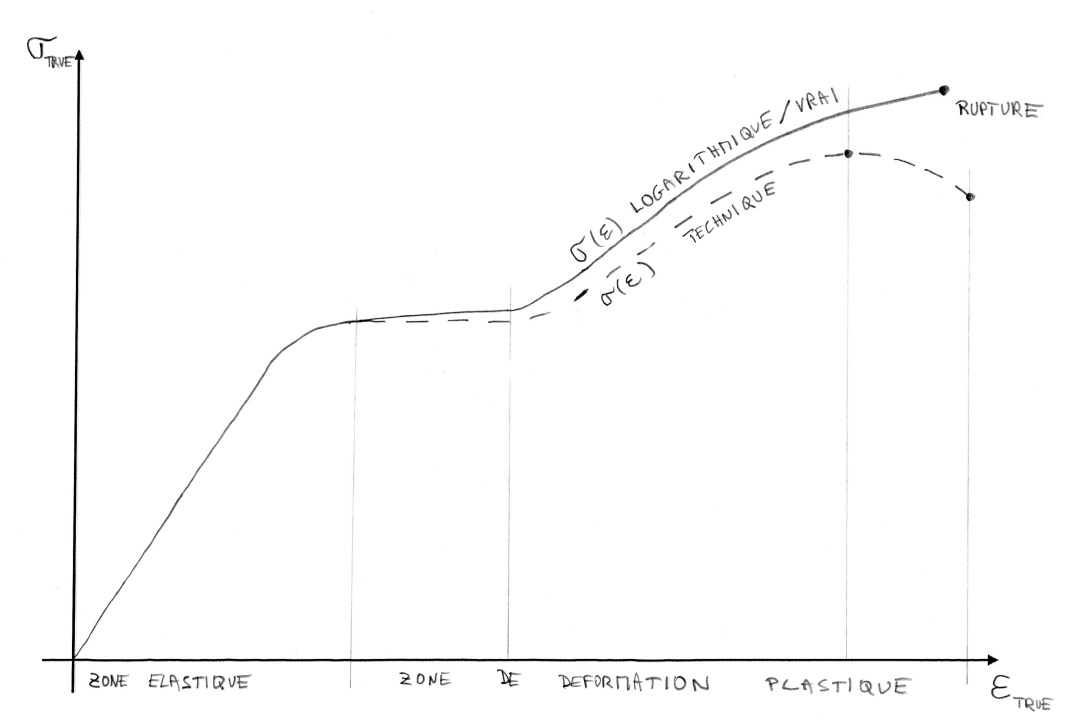
Contrainte/déformation logarithmique (ou vraie) - True strain/stressToujours dans le cas de tests en traction uniaxiaux on défini les contraintes et déformations logarithmiques en tenant compte de l'évolution de la géométrie; en particulier de la section réelle et de l'élongation réelle à chaque instant. Ces valeurs sont aussi appelées contraintes/déformations vraies. Dans les logiciels de simulation numérique c'est en général la relation contrainte vraie vs déformation vraie qui est nécessaire pour décrir le modèle matériau utilisé. En écrivant les équations pour les contraintes/déformations vraies on constate que ces dernières peuvent s'exprimer en fonction des contraintes/déformations techniques par les formules ci-dessous:
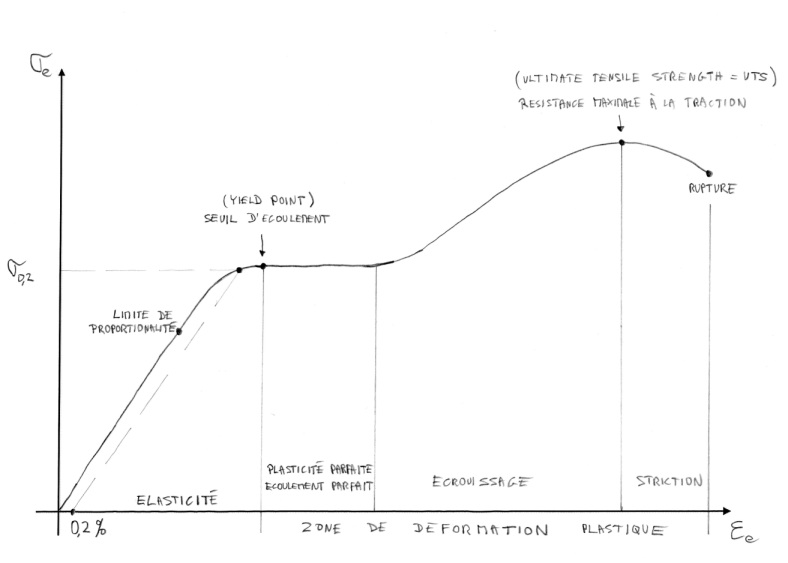
Graphique de la contrainte en fonction de la déformationSuivant si l'on considère les contraintes/déformations techniques ou logarithmiques on obtient des graphes avec une allure un peu différente. Voici les caractéristiques génériques de ce type de graphes pour les deux approches. Contraintes techniques vs déformations techniques:
Contraintes logarithmiques vs déformations logarithmiques:
|
||